
|
Yuyang Gao 高宇阳 I'm an year 4 undergraduate student at The Hong Kong Polytechnic University, pursuing a BEng in Electrical Engineering with a secondary major in AI. I work in the RAIDS Group, advised by Prof. Pai Zheng. My research interests center on Robotic Manipulation, Humanoid Robots, and Multimodal Robot Learning, and also, chopin's music and piano playing techniques. |
ResearchMy research focuses on the co-development of software and hardware to empower robots with more efficient learning and task execution capabilities. I am particularly interested in approaches that enable robots to effectively utilize force and tactile data, adapt their behavior accordingly, and accomplish contact-rich manipulation tasks. |

|
Glovity: Learning Dexterous Contact-Rich Manipulation via Spatial Wrench Feedback Teleoperation System
Yuyang Gao, Haofei Ma, Pai Zheng Low-cost open-source teleoperation system with wrench feedback and haptic glove with fingertip calibration for dexterous contact-rich manipulation. The system improves task success and efficiency while outperforming commercial gloves in thin-object grasping, and enables efficient data collection for force-aware imitation learning. |
|
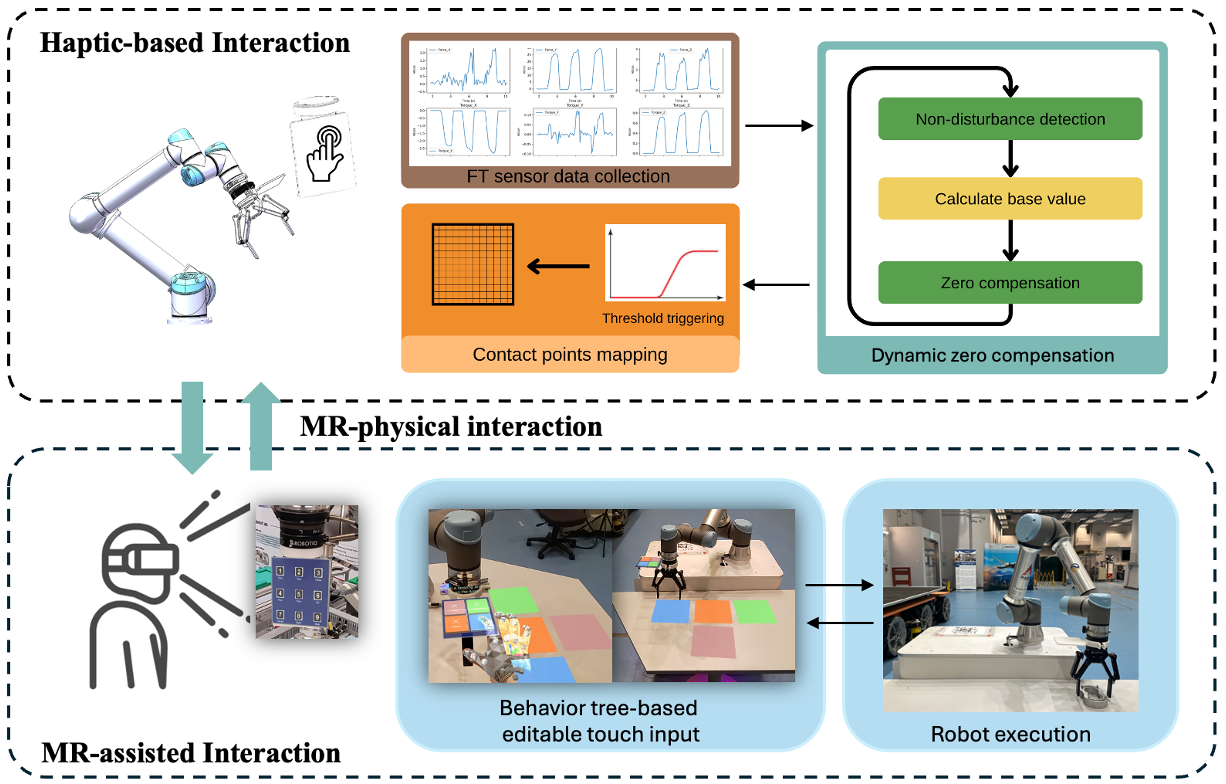
A Haptic-Enhanced Interaction Approach for Mixed Reality-Assisted Human-Robot Collaboration
Yue Yin, Chengxi Li, Yuyang Gao, Xinyu Ning, Pai Zheng A haptic-enhanced interaction approach for MR-assisted HRC, integrating interchangeable touch boards with editable virtual panels and force-torque-based tactile analysis for intuitive robot control. The approach enables dynamic task guidance via behavior trees while outperforming gesture recognition in efficiency and accuracy. |
|
Website template from here
|